一种借助平行四边形机构构成的爬楼机器人的制做方式
【技术领域】
[0001]本发明涉及爬行机器人技术领域,具体而言,涉及一种借助平行四边形机构构成的爬楼机器人。
【背景技术】
[0002]在日常生活和生产中人们常常要把重物搬上楼梯,传统的方式基本是靠人力搬运完成。并且当重物过重或是人手不足时,搬运就难以成功,因而人们发明了多种爬楼装置来克服这个困局,保障人身安全,改善劳动环境,提升劳动生丰度。按原理来分,这种装置主要分为辐条式、履带式和步行式。
[0003]辐条式爬楼装置上下走道时平稳性不高,重心起伏较大,且装置容积较大,很难在普通住宅走道上使用。轮式式爬楼装置重量大、运动不够灵活、爬楼时在走道边沿引起巨大的压力,对走道有一定的毁坏,且平地使用所遇阻力较大,这种问题限制了其在日常生活中的推广使用。与前两种相比步行式爬楼装置模仿鸟类爬行的动作,可视为多足爬行机器人,采用多条机械腿交替升降、支撑坐椅爬楼的原理,爬楼时重心平稳,运动灵活,适宜不同规格的走道。为此,多足爬行机器人可以代替辐条式、履带式机器人完成多种运输、探测作业。
[0004]现有多足爬行机器人通常的典型设计包括双足人形机器人,四足机器人和六足机器人,脚部结构多为串联结构。四足机器人静态稳定性能大大优于二足,且机构的冗余和控制复杂程度比六足和八足简单。而串联结构相比于并联结构来说具有累积偏差、精度较低,结构不紧凑、刚度低、承载能力小等缺点。
[0005]诸如公开号CN104760630A中国发明专利,其公开了一种仿人步态爬走道机器人,包括四只结构相同的头部、连接部份及控制系统;其中,每一脚部包括安装板,前右脚及后脚跟呈Z字形状安装于安装板的一侧,驱动装置安装于安装板中;沿走道的爬升方向,坐落后面的双脚部为前脚,坐落前面的双脚部为后脚,前脚通过所述联接部份与后脚相联接;所述控制系统与所述驱动装置电性相接并控制所述驱动装置。该发明的仿人步态爬走道机器人的结构和联接形式是在仿造人体脚结构的基础上,结合走道自身的形状所设计下来的,其行走的状态与人上楼梯的状态基本相像,不会对走道本身导致破坏,具有较高的稳定性。但该机器人主要借助前脚趾和后脚跟与走道接触,其所能承受的承载力小,但是膝盖的端部贴合在走道上对走道会导致锈蚀。
[0006]又譬如授权公告号为CN202997150U的中国实用新型专利,其公开了一种四足爬走道机器人机构,其包括上体和与其联接的四个并联脚部,每位脚部包括与上体固接的固定平台、触脚和联接在固定平台和触脚之间的三条结构相同的运动酰基,三条运动酰基轴对称均匀布置,每条运动酰基包括主动臂和从动臂,主动臂的一端与旋转驱动装置联接,主动臂的另一端与一空心球状接头固接,旋转驱动装置固定在固定平台的下边;与三条运动酰基的三个空心球状接头同心嵌装产生触脚,相邻两个空心球状接头之间产生球面副。该技术方案才能手动行走、上下走道,可携带较大负重,保证在行动中机器人上体仍然保持水平,但其结构较为复杂,但是其的行走机构是由三条运动酰基组成的,其行走的过程较为复杂,而且稳定性比较低。
【发明内容】
[0007]为了解决现有技术中精度较低,结构不紧凑、刚度低、承载能力小等缺点,通过设计为平行四边形机构实现机器人的稳定性。
[0008]为了实现上述目的,本发明的技术方案是:
一种借助平行四边形机构构成的爬楼机器人,包括框架、主动X支架、从动X支架和行走足,所述行走足由第一行走足支撑轴和第二行走足支撑轴支撑;主动X支架与动力输入轴联接;从动X支架与支撑轴联接;动力输入轴、支撑轴、第一行走支撑轴、第二行走支撑轴、主动X支架以及从动X支架构成平行四边形机构。平行四边形机构的引入促使所有各行走足的底板一直与地面平行,因而提升了整个机器人的工作稳定性;机器人的行走时,只要行走脚部板与地面结合,就可以保证行走足支腿与地面垂直,因而保证框架与地面垂直,框架上的货物不会掉落。
[0009]优选的是,所述主动X支架与从动X支架的外型为X形结构板。
[0010]在上述任一方案中优选的是,所述主动X支架与从动X支架之间设有四个行走足。
[0011]在上述任一方案中优选的是,所述行走足上设有两根销轴,在机器人行走时,行走足一直与地面垂直,因而保证了机器人的稳定性。
[0012]在上述任一方案中优选的是,所述机器人由四套爬楼机构组成,四套爬楼机构两两构成前、后、左、右四组爬楼机构,并由同一个动力源驱动,因而可以保证四套爬楼机构的运行同步。
[0013]在上述任一方案中优选的是,所述四套爬楼机构分别为后排右侧爬楼机构、前排右边爬楼机构、后排右侧爬楼机构和后座左边爬楼机构。
[0014]在上述任一方案中优选的是,所述后排右侧爬楼机构与后座右侧爬楼机构通过两根前后保持曲轴构成平行四边形机构,保证行走脚部板与走道地面接触。
[0015]在上述任一方案中优选的是,所述后排左侧爬楼机构与后座左边爬楼机构通过两根前后保持曲轴构成平行四边形机构,保证行走脚部板与走道地面接触。
[0016]在上述任一方案中优选的是,所述后排右侧爬楼机构与后排左侧爬楼机构组成前行走机构;后座右侧爬楼机构与后座左边爬楼机构组成后行走机构。
[0017]在上述任一方案中优选的是,所述主动X支架由驱动机构直接驱动。
[0018]在上述任一方案中优选的是,所述主动X支架通过蜗杆传动机构驱动从动X支架。
[0019]在上述任一方案中优选的是,所述蜗杆传动机构的传动比为1:1,因而保证了主动X支架与从动X支架运行方向及运动速率的一致性。
[0020]在上述任一方案中优选的是,所述蜗杆传动机构包括第一蜗杆、第二蜗杆和第三蜗杆。
[0021]在上述任一方案中优选的是,所述蜗杆传动机构与四个行走足、主动X支架以及从动X支架构成四个平行四边形机构。
[0022]在上述任一方案中优选的是,所述行走足与第一行走足支撑轴、第二行走足支撑轴通过行走足支腿联接。
[0023]本发明的借助平行四边形机构构成的爬楼机器人的工作过程为:驱动机构开启后,后排右侧爬楼机构中的主动支架以及后排左侧爬楼机构中的主动X支架绕着动力输入轴转动,并通过蜗杆机构推动从动X支架绕支撑轴转动,进而推动前行走机构中的行走足向下举起的同时往前行走,与此同时动力通过链轮齿轮传动,或链传动等方法(非本专利申请要件,图中未示出)同步输送给前排右边爬楼机构、后排左侧爬楼机构,推动下后座右侧爬楼机构及后座左边爬楼机构的主动X支架转动,进而推动后行走机构中的行走足同步向下举起,同时同步往前行走。因为后排右侧爬楼机构与后座右侧爬楼机构通过前后保持曲轴构成平行四边形机构;后排左侧爬楼机构与后座左边爬楼机构通过前后保持曲轴构成平行四边形机构,保证行走脚部板与走道地面接触。另外,动力输入轴、支撑轴、第一行走支撑轴、第二行走支撑轴、主动X支架以及从动X支架构成平行四边形机构。平行四边形机构的引入促使所有各行走足的底板一直与地面平行,因而提升了整个机器人的工作稳定性;机器人的行走时,只要行走脚部板与地面结合,就可以保证行走足支腿与地面垂直,因而保证框架与地面垂直,框架上的货物不会掉落。
【附图说明】
[0024]图1为根据本发明的借助平行四边形机构构成的爬楼机器人的一优选施行例的结构示意图。
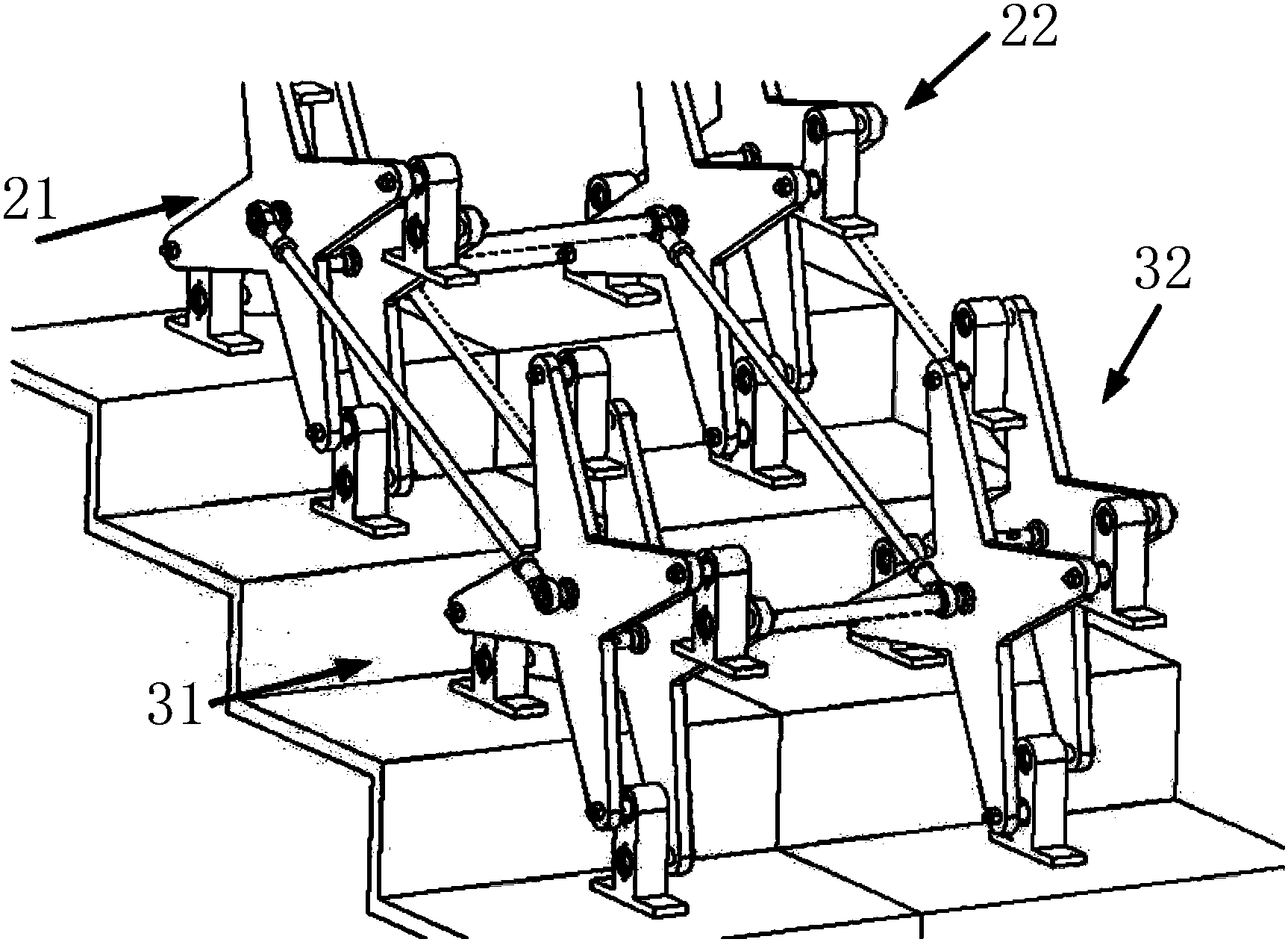
[0025]图2为根据本发明的借助平行四边形机构构成的爬楼机器人的图1所示优选施行例中前、后爬楼机构的结构示意图。
[0026]图3为根据本发明的借助平行四边形机构构成的爬楼机器人的图1所示优选施行例中主动X支架与从动X支架联接关系的结构示意图。
[0027]图4为根据本发明的借助平行四边形机构构成的爬楼机器人的图3所示优选施行例的分拆图。
[0028]图5为根据本发明的借助平行四边形机构构成的爬楼机器人的图3所示优选施行例中的侧视图。
[0029]图6为根据本发明的借助平行四边形机构构成的爬楼机器人的图2所示优选施行例的原理图。
[0030]图7为根据本发明的借助平行四边形机构构成的爬楼机器人的图3所示优选施行例中行走足的结构示意图。
[0031]图8为根据本发明的借助平行四边形机构构成的爬楼机器人的图3所示优选施行例的结构简化图。
[0032]图9为根据本发明的借助平行四边形机构构成的爬楼机器人的图2所示优选施行例中前、后爬楼机构的简化图。
[0033]图10为根据本发明的借助平行四边形机构构成的爬楼机器人的图1所示优选施行例的工作原理图。
【具体施行方法】
[0034]下边结合说明书附图对本发明的借助平行四边形机构构成的爬楼机器人的【具体施行方法】作进一步的说明。
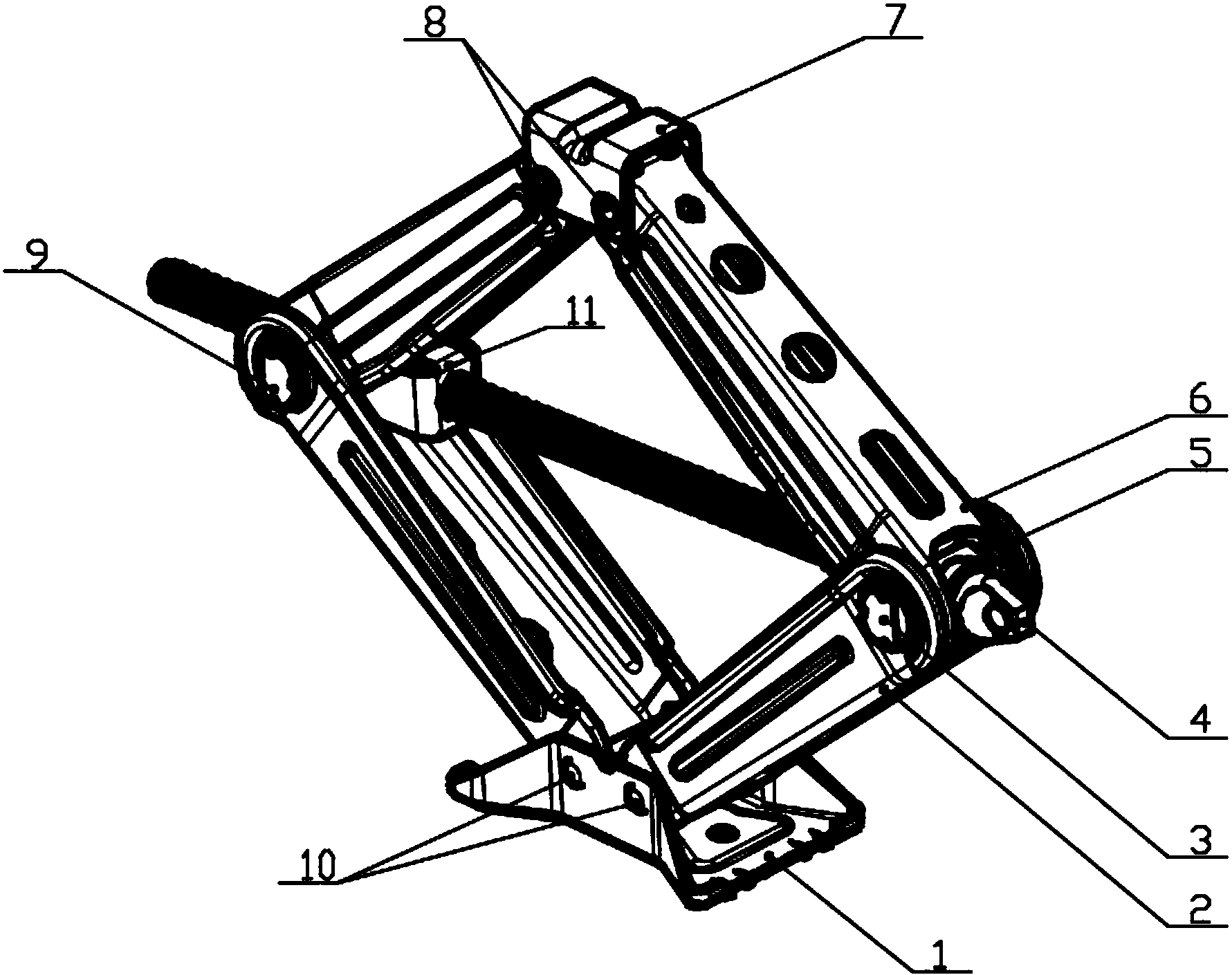
[0035]如图1所示,根据本发明的借助平行四边形机构构成的爬楼机器人的一优选施行例的结构示意图。一种借助平行四边形机构构成的爬楼机器人,包括框架1、主动X支架2、从动X支架3和行走足4,所述行走足4由第一行走足支撑轴7和第二行走足支撑轴8支撑;主动X支架2与动力输入轴10联接;从动X支架3与支撑轴9联接(如图6所示)。动力输入轴10、支撑轴9、第一行走支撑轴7、第二行走支撑轴8、主动X支架2以及从动X支架3构成平行四边形机构14(如图6所示)。平行四边形机构的引入促使所有各行走足4的底板一直与地面平行,因而提升了整个机器人的工作稳定性;机器人的行走时,只要行走足4的底板与地面结合,就可以保证行走足支腿6与地面垂直,因而保证框架I与地面垂
")
概")




")
")
