机械手能模仿人手和臂的个别动作功能,用以按固定程序抓取、搬运物件或操作工具的手动操作装置。机械右臂有多种用途,除了可以安装在机器人身上,也可以给残障人拿来当义肢。作为一个工程师,塑造出一个机械臂除了是很酷更是很有意义的一件事,分享电路城上8个精彩的机械臂的设计,找寻属于你的灵感吧!
1、【2017贸泽比赛】二等奖作品:VR视角远程牵引控制机械臂
项目方案:VR+动捕+机械臂。
项目完成情况:
把CC3220开发板的TCPServer弄下来了,可以远程控制机械臂了,最终还是没有时间搭建HTTPServer,摄像头共享就只能定夺了。
不采用传统的输入设备(如:鼠标、鼠标、手柄等)来做控制,也不是简单的让机械臂和操作者的手指同步。具体实现步骤如下。
1.制做一个机械臂
某宝上直接买了一个几十块现成的,即使很糙,并且足够用了。
2.安装机械臂的第一视角
配合两个襟翼实现上下左右的转动。
项目链接:
2、【2017贸泽比赛】三等奖作品:通过简单的手势控制机械臂运动
本系统是采用CC32203220s与LPC54608制做的手势控制的机械臂系统。可以完成通过简单的手势对机械臂的控制。手势辨识指令采用的是MPU6050以及CC32203220S自带的BMA222加速度计组合采集的。CC32203220S作为手势端,将采集到的角度值进行剖析、滤波、修正以后通过蓝牙发送给LPC54608,其中LPC54608作为控制端,与襟翼相连,接收手势命令,通过混频、限幅与消抖然后控制襟翼,从而完成机械臂的运动。通讯采用蓝牙进行,CC32203220S将须要传输的数据进行处理封装、打包,通过并口进行发送,LPC54608将接收到的数据进行解析,避免出错。经实物验证,功能就能实现。
项目链接:
3、会模仿、会学习的超酷大型机械臂电路图及代码
它会模仿,还懂学习,而且能无数次的循环重复这种动作。当电瓶的电量不足时,它的记忆功能便会遗失,当再度饱含电运行它的时侯,所有数据就会清零,这又是一个全新的机器人了。为了让这个机器人运转得更炫酷,我还添加了一个线程来估算不同的定焦以易于每位襟翼的运作都会同时开始和结束。同时我还降低了一个“梯度”变量来缓冲“增/减速”。短距离的运输,机器人的运作速率都会比较慢,倘若是较长的距离,他的速率也会推动。
项目链接:
4、delta并联臂机械手弧形直线插值算法源码图纸
delta并联臂机器源码算法开源人机械手搬运蜘蛛手筛选业余做的研究,分享全套图纸源码算法,提供技术支持。
delta并联机械手可以实现(快/中/慢)走空间任意线段,可拿来拓展研制堆码分拣搬运

项目链接:
5、手部运动控制机器人手指
由nRF2424LL0101分线板和ArduinoProMini供电的发射器电路联接到手套上。该电路还包含IMU和柔性传感。
对于这个项目,使用了DIYflex传感:
柔性传感在管的两端包含光发射器和接收器。当管弯曲时,光接收器接收较少的光,因而测量弯曲。
该MPU6050IMU检查转动手掌。测量到运动并通过nRF2424LL0101收发器发送到接收电路。

接收器电路对来自发射器的数据进行解码,并相应地联通四伺服机械臂。使用的机械臂是MeArm的机械臂。
项目链接:
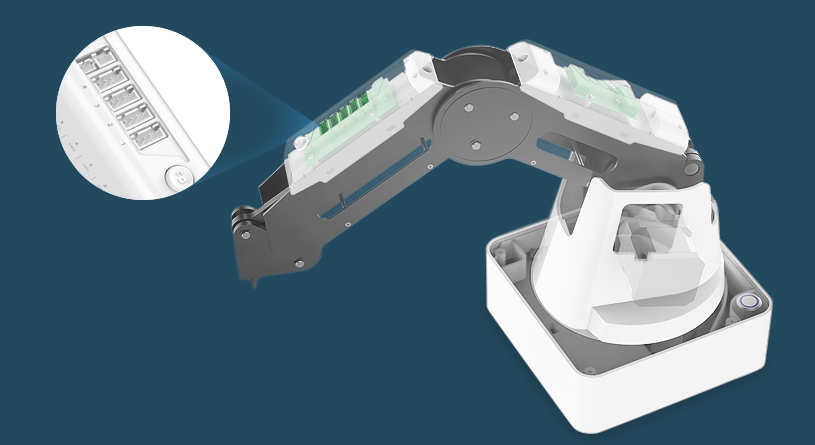
6、Android控制的6DoF机器人手指
大多数6DoF机械臂配有一个带RS-232的控制板,用于桌面控制,我们简单地调整控件便于与Android设备一起使用。
我们获得了机器人手指作为学习在线项目共享平台上发布项目的应用程序,我们决定调整右腿使用Android智能手机进行远程控制。
大多数市场上可用的机器人手指都配有控制板,配有RS-232插口,可通过桌面软件进行控制,据评论此板和附送的软件常常不可靠,因而我们决定取消这部份,而是用arduinouno取代1sheeldshield与Android智能手机无缝联接。
项目链接:
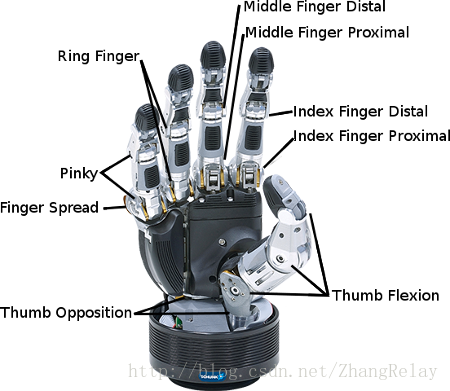
7、手势辨识控制的3D复印机械手-智能性最强的机械右手
这个版本的机械右手可以采用PC机进行控制,也可以使用手势辨识算法来控制。5个脚趾和手指均可活动,但是手腕关节可以精准定位,进行各类微小角度的开合。该机械手对3D复印机精度要求较高,须要0.1mm精度,达不到此精度的话传动机构会出问题。使用并联臂3D复印机,ABS、PLA塑胶进行3D复印。5个脚趾,每根都可以进行开合,请看视频,每根脚趾都可以精确运动到任意一个角度,手臂可以进行旋转。可以抓取球,笔,酒杯,遥控器等物品。
项目链接:
8、3D复印机械手掌,带抓取功能的机器人
你有没有想过让自己做的机器人拥有动手能力呢?出于这个看法,我准备把轮式货车结合夹持器做一个有抓取功能的货车。因为装在货车上方无法抓到地面上的东西,因而还须要给货车降低伸缩的功能。使用3D复印机复印一个可以伸缩的支架,并找了一个可以配合的螺纹马达来实现伸缩功能。
项目链接:








