摘 要: 在往返式传动控制系统中,很多时侯会涉及到定位控制的问题。即要求在不同的定位点执行不同的动作,但是因为机械惯性的作用,常常会给系统带来定位点偏差。本系统以装板机的机械传动为例,采用OMRON CJ系列PLC作为控制器,通过变频器调节速率,利用旋转编码器和高速计数器进行定位控制,从而实现精确定位。
关键词: 旋转编码器;高速计数器;PLC;变频器
中图分类号:TM910 文献标识码:A 文章编号:1671-7597(2012)0210120-02
0 引言

在人造板生产线中,早期的装板机定位控制都是采用接近开关,作为装板机传动过程中高、低速切换的讯号来源。在调试的过程中,经常须要搬动接近开关的位置,以使装板机达到最佳的定位状态。特别是在生产的过程中,由于装板机前进和退后比较频繁,再加上装板机在传动的过程中机械震动,经常性的造成接近开关松动,从而促使装板机经常定位不佳。为了克服上述的不利诱因,达到精确定位的目的,因此采用旋转编码器来控制装板机的定位。
1 装板机传动的控制要求
图1所示装板机的传动示意图。传动系统从原点启动,中速前进到800mm,开始高速前进,高速前进到2500mm,开始中速前进,中速前进到3000mm,开始低速前进,低速前进到终点3500mm停车。待装板机前进到位,停顿3秒,反向高速退后,高速退后到距原点1000mm,开始中速退后,中速退后到距原点700mm开始低速退后,到达原点停止。在原点和终点低速行驶时为了防止机械惯性带来的定点偏差,做到原点和终点的精确定位停车。
2 装板机传动的控制系统硬件设计
2.1 系统对变频器的控制要求
变频器的正反转由大型熔断器K1、K2执行,速度的切换由大型熔断器K3、K4执行。变频器的故障报案输出触点(R1A、R1C)去停止整个系统的运行,并且有相应的报案指示输出。变频器具有多段速率设定功能,当K3衔铁时为低速,当K4衔铁时为中速,当K3、K4都衔铁时为高速。
2.2 PLC硬件系统的构成
为了实现对装板机传动的精确定位,本系统采用OMRON CJ系列的PLC作为控制器,通过变频器进行速率调节,利用旋转编码器和高速计数器进行定位控制。
根据装板机传动的控制要求,本系统中开关量输入点8个,开关量输出点8个,具有读取脉冲输入功能的高速计数模块一个。本系统采用OMRON CJ1M CPU23作为控制器、CJ1W-CT021作为高速计数模块。此系统的I/O分配及配线如图2、3所示。
3 梯形图程序的设计
3.1 梯形图程序的说明
梯形图程序的设计包括主程序用于实时调用自动子程序(ZC_1)和手动子程序(ZC_2)。子程序ZC_1(实现自动控制)、ZC_2(实现自动控制)和中断处理程序INT_10、INT_11、INT_12程序(用于处理高速计数器计数当前值抵达不同设定值的处理)。以下图4、5所示,高速计数器的设置以及部份程序为例,说明变频器对速率的控制和调节。
3.2 梯形图设计过程中要注意的问题
1)实现多点定位控制的关键点
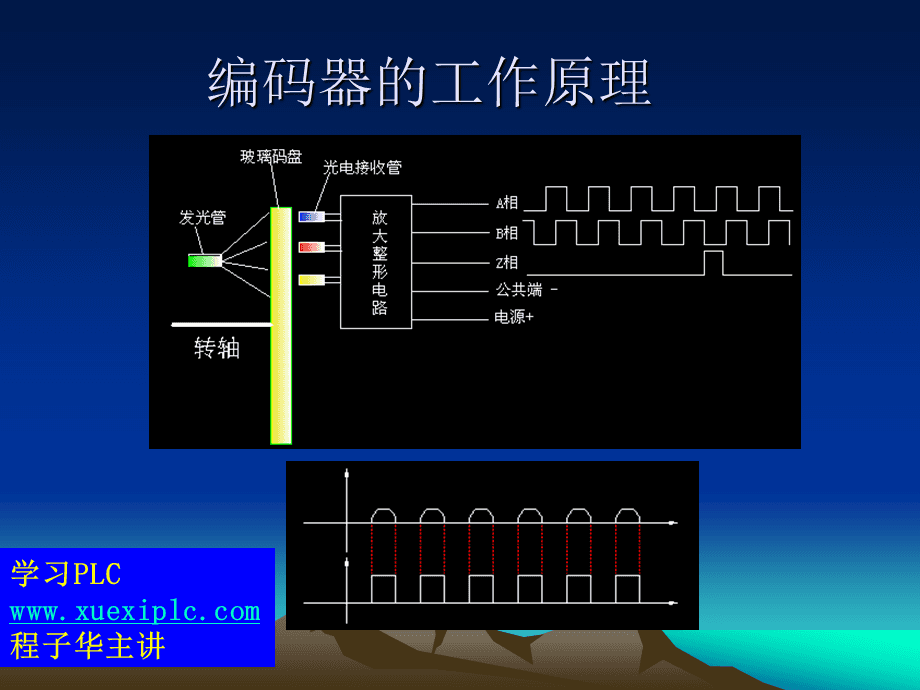
第一点是设置高速计数器中断风波(计数器当前值小于等于计数器设定值),第二点就是定位控制须要检测定位点与原点的距离,然后将单位距离(mm)转换成脉冲量,通过旋转编码器和PLC高速计数器记录脉冲量。本系统中,旋转编码器的机械轴和电动机同轴。传动比=12,用于驱动设备的传动辊半径=80mm,旋转编码器每转脉冲数=600个/转。可以估算出每毫米距离的脉冲数为:每毫米距离的脉冲数=600÷(12×80×3.14)≈0.19904脉冲/mm定点位和设定值比较,最好采用高速计数器中断形式,而不能采用通常的比较指令。因为通常的比较指令难以捕捉高速变化的风波。所以必须通过CTBL指令将高速计数器中断风波号(计数器当前值小于等于计数器预置值)与中断处理程序联接,并执行工艺要求的熔断器输出,处理变频器的运行速率。
2)在运行中,高速计数器的设定值写入必须严禁
由于多点定位须要多次比较中断,避免机械缘由带来的偏差。
3)多点定位的输出尽量采用立刻刷新指令
采用高速计数器进行多点定位,主要是为了精确定位。定位精度决定于高速计数器的检测和执行机构的快速性。如果采用普通输出指令,在一个扫描周期的程序执行阶段,改变的仅仅是输出映像存储器,PLC的输出点不会立刻刷新,只有在程序执行完毕后,PLC的输出映像存储器能够对输出点刷新,执行输出。为了降低定位精度,采用立刻刷新输出指令。立即输出指令不受PLC扫描周期阶段的限制,在改变输出映像存储器的同时,PLC的输出点也立刻改变。
4 结束语
往返式传动控制系统的多点定位是一个较难解决的问题,本系统采用PLC作为控制器,通过变频调速,利用旋转编码器和高速计数器进行定位控制,克服了传动控制系统中因为机械惯性的作用给系统带来的定点偏差,从而实现了精确定位。采用此种形式,调试将愈加便捷、快捷。
参考文献:
[1]OMRON CJ1 可编程序控制器编程指南,2003.
[2]OMRON CJ1W-CT021 高速计数单元操作指南,2003.
[3]ATV 31H异步电机变频器编程指南.
[4]陈伯时,电力拖动自动控制系统,北京:机械工业出版社,2003.7.








