旋转测位编码器AVM58N-011K1R0GN-1213
增量值旋转编码器,也叫圆光栅、脉冲码盘,从这种名称可以晓得,它是方形的光栅刻线码盘,旋转后通过光通量的疏密变化,形成脉冲,通过外部设备的计数脉冲,来增量地加(或减)脉冲数而测得旋转的角度。诸如,圆光栅每周刻有360条刻线,每位刻线形成的一个脉冲就相当于1度,测得脉冲累计降低30个,就是正向选转了30度。
为何要用旋转编码器,不是有光幕传感来测距吗,用旋转编码器肯定要进行换算,主要是传动比,螺栓距离等常量,进行换算到每一个脉冲联通多少距离。
AVM58N-011K1R0GN-1213
AVM58N-011K1R0BN-1213
AVM58N-011K1RHGN-1213
ENI58IL-H10BA5-1024UD1-RC1
ENI58IL-H12BA5-1024UD1-RC1
ENI58IL-S10CA5-1024UD1-RC1
ENI58IL-S10CA5-2500UD1-RAA
FVM58N-011K2R3GN-1213
FVS58N-011K2R3GN-0013
RHI90N-0EAAAR61N-01024
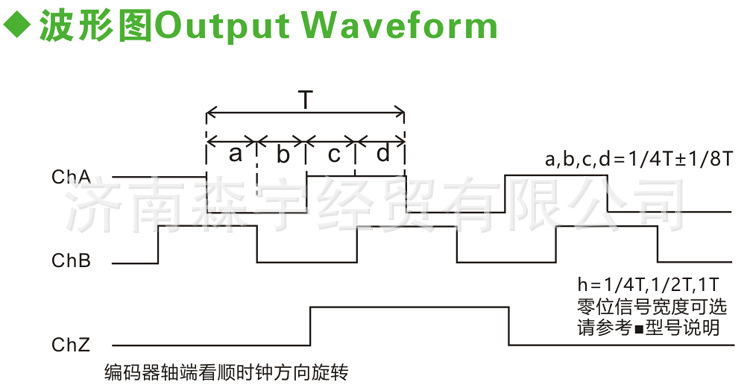
实际上读取这种刻线的光眼有两个(或有四个),两个光眼各自输出A相于B相,用以判定刻线是从那个方向过来的,是A提早于B,还是B提早于A,如同人的左右眼,因而晓得编码器的旋转方向,这样,判定脉冲的计数是增还是减,因而获得真实的旋转角度。
在实际使用中,A相与B相的位置相差1/4个脉冲周期,这样,从正方向过来是1/4周期差,而从反方向过来就是3/4,可用于判定旋转方向。假如以一个脉冲周期为360度“相位"角,这样的1/4就是90度相位差,而3/4就是270度相位差。另外,旋转编码器每圈还有一个单独的刻线,相当于零值(Zero),亦称为Z相,用于读取每周的起始点。
旋转测位编码器AVM58N-011K1R0GN-1213








